














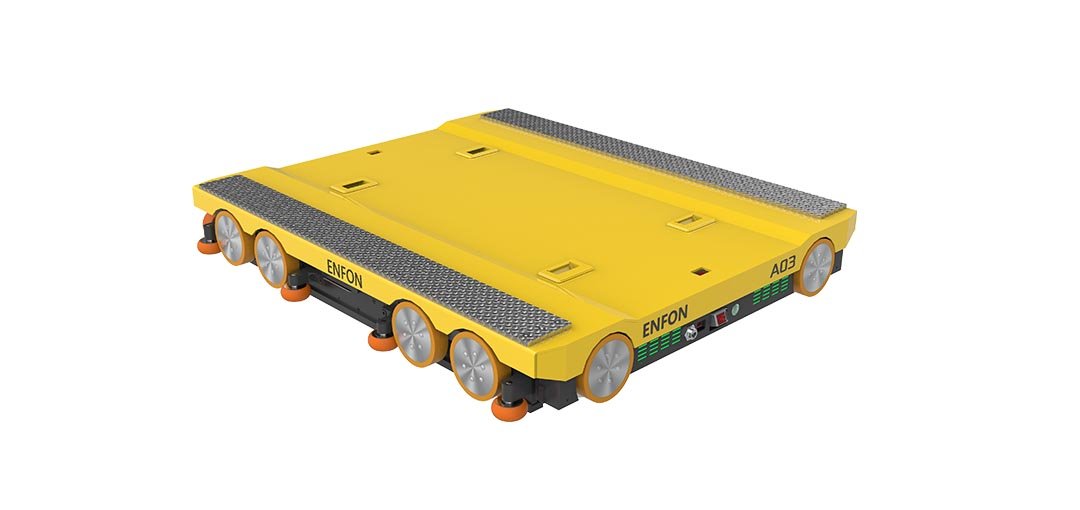
4 Way Pallet Shuttle
ตัวรับ-ส่งสินค้าภายในชั้นวางชนิดพาเลทที่เคลื่อนที่ได้ตามสี่ทิศทางเป็นหุ่นยนต์อัจฉริยะ สามารถยกสินค้าและเอาสินค้าออกในชั้นวางของ เดินตามสี่ทางในชั้นวาง วางของ ฯลฯได้โดยการตั้งโปรแกรม และสามารถสื่อสารกับคอมพิวเตอร์แม่ข่ายหรือระบบ WMS ได้

พารามิเตอร์ประสิทธิภาพ
หมายเลขซีเรียล | ข้อมูลจำเพาะ | รุ่นอุปกรณ์ HP-4 Way-1000-G1 | รุ่นอุปกรณ์ HP-4 Way-1000-G1 |
1 | ขนาด | W977xD1100xH156mm | |
2 | ข้อมูลจำเพาะของพาเลทที่ใช้ได้ | W1100~1250xD800~1250mm | |
3 | ประเภทพาเลท(รูปแบบด้านล่าง) | เช่นรูปแบบ“川”(ตัวอักษรจีน) รูปแบบ“田”(ตัวอักษรจีน) | |
4 | น้ำหนักบรรทุกรวม
| MAx1000kg | MAx1500kg |
5 | วิธีการหาตำแหน่ง | การหาตำแหน่งด้วยโฟโตอิเล็กทริค +การหาตำแหน่งด้วยตัวเข้ารหัส
| |
6 | ความเร็วสูงสุดในกรณีที่ไม่บรรทุกของ(แกน XY)
| 2m/s | |
7 | ความเร็วสูงสุดของแกน X ในกรณีที่บรรทุกของแบบเต็ม
| 0.8m/s | 0.75m/s |
8 | ความเร็วสูงสุดของแกน Y ในกรณีที่บรรทุกของแบบเต็ม
| 0.8m/s | 0.75m/s |
9 | มอเตอร์ตัวเดิน
| DC48V | |
10 | ย้อนกลับ/แม่แรงมอเตอร์ | DC48V | |
11 | อุณหภูมิโดยรอบ | 0~45℃ | |
12 | ตัวควบคุมโปรแกรม | SIEMENS PLC/การ์ดควบคุม | |
13 | พลังงาน | แบตเตอรี่ลิเธียม | |
14 | จำนวนครั้งการชาร์จแบตเตอรี่และการปล่อยกระแสไฟฟ้า/จำนวนครั้งการชาร์จตัวเก็บประจุซุปเปอร์และการปล่อยกระแสไฟฟ้า | >1000 次ครั้ง
| |
15 | วิธีการสื่อสาร | WIFI2.4/5.8GHz/5G | |
16 | รีโมท ปฏิบัติการโดยใช้เครื่องควบคุมจากระยะไกลแบบไร้สาย
| ปฏิบัติการโดยใช้เครื่องควบคุมจากระยะไกลแบบไร้สาย
| |
17 | วิธีการเบรค | เซอร์โวมอเตอร์ ตัวควบคุมเซอร์โว
| |
18 | การเร่งความเร็วของตัวรับ-ส่งสินค้าภายในชั้นวางแบบไร้สาย | ความเร่งสูงสุด 1m/s² | |
วิดีโอผลิตภัณฑ์
Enfon 4 Directions Pallet Shuttle Animation